| 傂傠傗偡乛埳摗(vnnc8158) 2025-11-27 04:47:08 |
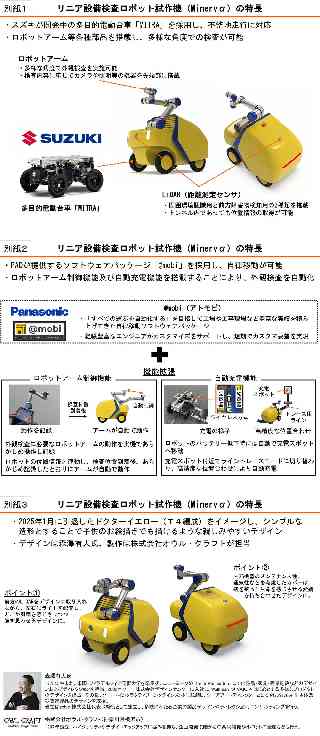
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂俀侽俀俆擭侾侾寧俀俇擔 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂搶奀椃媞揝摴姅幃夛幮 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂僗僘僉姅幃夛幮 丂丂丂丂丂丂丂丂丂丂丂丂丂丂 僷僫僜僯僢僋 傾僪僶儞僗僩僥僋僲儘僕乕姅幃夛幮 丂丂丂丂丂丂丂丂丂挻揹摫儕僯傾偺愝旛専嵏儘儃僢僩偺奐敪 丂搶奀椃媞揝摴姅幃夛幮乮戙昞庢掲栶幮挿 扥塇 弐夘丄埲壓乽俰俼搶奀乿乯偲僗僘僉姅幃夛幮乮戙昞庢掲栶幮挿 楅栘 弐岹丄埲壓乽僗僘僉乿乯丄僷僫僜僯僢僋 傾僪僶儞僗僩僥僋僲儘僕乕姅幃夛幮乮戙昞庢掲栶幮挿 慜揷 悞夒丄埲壓乽PAD乿乯偼丄挻揹摫儕僯傾偺塣峴傪巟偊傞奺庬婡夿愝旛偺揰専丒曐慡嬈柋偺岠棪壔偵岦偗偰丄偙傟傜偺奜娤専嵏拲1傪帺摦偱幚巤偡傞愝旛専嵏儘儃僢僩偺帋嶌婡乮Maglev Inspection and Exploration Robot Vehicle 兛 version丄埲壓乽Minerv兛乮儈僱儖償傽乯乿乯傪奐敪偟傑偟偨丅 丂崱屻丄嶳棞儕僯傾幚尡慄偵偰専徹傪峴偄丄幚梡壔傪栚巜偟偰傑偄傝傑偡丅 侾丏奐敪偺攚宨丒栚揑 丒嶳棞儕僯傾幚尡慄偵偼暘婒憰抲傗忔崀憰抲偺傛偆側摿桳偺婡夿愝旛偑懚嵼偟傑偡丅偙傟傜偺愝旛偼幚尡慄撪偱傕揰嵼偡傞偨傔丄揰専売強傑偱嶌嬈幰偑挿帪娫偐偗偰傾僋僙僗偡傞昁梫偑偁傝傑偡丅壛偊偰丄椺偊偽暘婒憰抲偺壓晹偵愝抲偝傟偰偄傞條乆側婡婍傪揰専偡傞応崌偼嫹偄応強偵偍偄偰懱偵晧壸偺偐偐傞巔惃偱懡偔偺崁栚傪揰専偟側偗傟偽側傜側偄側偳丄嶌嬈幰偵傕戝偒側晧扴偑偐偐偭偰偄傑偡丅 丒儕僯傾拞墰怴姴慄奐嬈屻偵偼摨條偺揰専嬈柋傪増慄奺抧偱峀偔峴偆昁梫偑偁傞偨傔丄愝旛偺揰専偵偼戝偒側楯椡偑偐偐傞偙偲偑憐掕偝傟傑偡丅 丒偦偙偱俰俼搶奀偼丄彨棃偺楯摥椡晄懌傪尒悩偊偨嬈柋偺岠棪壔傪栚揑偵丄儕僯傾偺婡夿愝旛偺奜娤専嵏偵岠壥揑側愝旛専嵏儘儃僢僩偺摫擖傪専摙偟偰偒傑偟偨丅 俀丏Minerv兛偺摿挿乮暿巻侾乣俁乯 丒僗僘僉偑奐敪拞偺懡栚揑揹摦戜幵乽MITRA拲2乿傪揝摴嬈奅偱弶傔偰嵦梡偟丄抜嵎偺偁傞応強傗嵒棙晘偒偺売強偺傛偆側晄惍抧憱峴偵懳墳丅傑偨丄儘儃僢僩傾乕儉摍奺庬晹昳傪搵嵹丅 丒PAD偑採嫙偡傞僜僼僩僂僃傾僷僢働乕僕乽@mobi拲3乿傪揝摴嬈奅偱弶傔偰嵦梡偟丄帺棩堏摦偑壜擻丅偝傜偵丄儘儃僢僩傾乕儉惂屼婡擻媦傃帺摦廩揹婡擻傪搵嵹偡傞偙偲偵傛傝丄奜娤専嵏傪帺摦壔丅 丒僾儘僟僋僩僨僓僀僫乕丒怷郪桳恖巵偵傛傞僪僋僞乕僀僄儘乕傪僀儊乕僕偟偨僇僶乕僨僓僀儞丅 俁丏婜懸偝傟傞岠壥偲崱屻偺梊掕 丒愝旛専嵏儘儃僢僩傪儕僯傾拞墰怴姴慄偺増慄奺抧偵攝抲偟丄奜娤専嵏傪帺摦偱峴偆偙偲偵傛傝丄恖偑尰抧傊堏摦偡傞帪娫傗揰専偵偐偐傞楯椡傗晧扴傪嶍尭偡傞偙偲偑偱偒傑偡丅 丒俀侽俀俇擭俀寧傛傝丄俁幮偱嶳棞儕僯傾幚尡慄偵偍偄偰婡擻惈偺妋擣側偳丄尰抧専徹傪幚巤偟丄崱屻偺愝旛偺揰専丒曐慡嬈柋偺岠棪壔偵宷偘偰偄偒傑偡丅 拲1丗愝旛偵彎傗曄宍側偳偑柍偄偐丄栚帇偱妋擣偡傞専嵏丅 拲2丗僗僘僉偑挿擭偺揹摦幵偄偡奐敪丒惢憿偵傛傝幚尰偡傞丄憱攋惈丒怣棅惈偵桪傟偨儌價儕僥傿丅帺摦憱峴儘儃僢僩傪抜嵎偑偁傞楬柺側偳偵摫擖偡傞偨傔偺乽儘儃僢僩偺懌乿偲偟偰採嫙偡傋偔奐敪拞丅 拲3丗帺棩堏摦儘儃僢僩偺奺庬婡擻傪幚尰偡傞僜僼僩僂僃傾僷僢働乕僕丅僙儞僒乕丄僐儞僩儘乕儔乕偲傾僾儕働乕僔儑儞傪僆乕儖僀儞儚儞僷僢働乕僕偱採嫙偟丄堏摦婡峔傪帩偮儘儃僢僩偵慻傒崬傓偙偲偱娙扨偵帺棩堏摦傪幚尰壜擻丅 |
||
|