NEWS RELEASE:JR&私鉄 5
| ひろやす/伊藤(vnnc8158) 2025-07-19 02:21:58 |
|
2025年7月16日
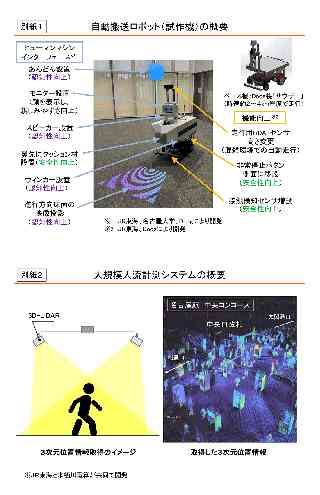
東 海 旅 客 鉄 道 株 式 会 社 ジ ェ イ ア ー ル 東 海 物 流 株式会社 国立大学法人東海国立大学機構名古屋大学 有 限 会 社 来 栖 川 電 算 株 式 会 社 D o o g 混雑する駅での自動搬送ロボット活用に向けた技術開発について 東海旅客鉄道株式会社(以下、JR東海)とジェイアール東海物流株式会社(以下、JR東海物流)は、国立大学法人東海国立大学機構名古屋大学(以下、名古屋大学)、有限会社来栖川電算(以下、来栖川電算)、株式会社Doog(ドーグ:以下、Doog)と共同で、安全の確保を第一に駅空間の利便性や快適性を損なうことなく駅構内の物流作業を自動化することを目標に、自動搬送ロボット活用に向けた開発を進めてきました。このたび、安全かつお客様が気づきやすく親しみやすい「自動搬送ロボット(試作機)」と、駅構内などの人の流れを正確に測定・解析できる「大規模人流計測システム」を開発しましたので、お知らせします。今後、お客様がいる駅での実証試験の検討を進め、実用化を目指してまいります。 1.開発経緯 ・JR東海ではグループ会社を含めて労働力人口の減少等に対応するため、ロボット等による作業の自動化に取り組んでいます。 ・駅構内の店舗には毎日多くの商品を運搬・供給する必要があり、JR東海物流が担当している名古屋駅の場合、繁忙期では1日あたりトラック約40台分の商品を、手押しの運搬車を用いて20名で延べ160回に分けて運搬していることから、多くの労力がかかっています。また、労働力人口が減少していく中で将来的に作業員の確保が難しくなることも想定されます。そのため、今後も継続してサービスを提供するためには、自動搬送ロボットを導入する等して、人に頼らない業務体制の整備や経験のない作業員でも運搬作業をできるようにすることが必要だと考えています。 ・混雑する駅構内に自動搬送ロボットを導入するためには、安全の確保が大前提です。加えてお客様が親しみやすく受け入れやすいことにも配慮が必要です。また、自動搬送ロボットがお客様の流れに与える影響を小さくすることが大切であり、これらの課題に対して技術開発を進めてきました。 2.「自動搬送ロボット(試作機)」の概要(別紙1) ・Doog製の自動搬送ロボット「サウザー」をベースに、混雑する駅環境で使用した場合のリスクアセスメント結果を踏まえ、更なる安全性向上のため、接触検知センサの追加設置など、機能改良を行いました。 ・さらに今回の開発では、モニターに顔を表示するなど、お客様が気付きやすく、親しみやすくするための各種ヒューマンマシンインターフェース注1(以下、HMI)を新たに開発・実装しました。 3.「大規模人流計測システム」の概要(別紙2) ・本システムは、自動搬送ロボットが駅構内を走行した際のお客様の流動への影響を継続的に計測するために使用します。 ・駅コンコースの天井に3D-LiDARセンサ注2を複数設置して、エリア内の人や構造物の3次元位置情報を取得し、AI等を活用して各人が歩いた軌跡を導き出します。これをもとに、広範囲・高密度な駅環境下において、人の動きを把握・分析できるシステムを構築しました。 ・本システムは非常に高い精度があり、将来的には、人流を予測し、その結果を踏まえた最適な移動ルートをロボットが設定することも視野に入れて検討を進めていきます。 4.検討推進体制 ・JR東海 :技術開発・試験・評価 ・JR東海物流 :物流業務を担うグループ会社 ・名古屋大学※ :HMIの検討・製作・評価、人流分析 ・来栖川電算 :人流計測システムの構築 ・Doog :自動搬送ロボットの機能改良 ※名古屋大学大学院 環境学研究科 井料美帆研究室 5.今後の予定 ・将来の実用化に向けて、名古屋駅等の人流が多い駅での実証試験を、今年度内を目標に実施することを検討しており、詳細が決まり次第お知らせします。 注1 人間と機械が情報をやり取りするためのインターフェースを指す。今回の自動搬送ロボットにおいては、周辺の人にロボットの存在や進行方向等の動作を示す仕組みを指す。 注2 レーザー光を用いたセンサの一種で、空間内での物の位置を3次元的に測定できるもの。 |
||
|
||
|
|
NEWS RELEASE:JR&私鉄 5
| ひろやす/伊藤(vnnc8158) 2025-10-11 04:56:49 |
|
2025年10月10日
東海旅客鉄道株式会社 自動搬送ロボット活用に向けた名古屋駅における実証試験について 2025年7月16日にお知らせした「混雑する駅での自動搬送ロボット活用に向けた技術開発について」のとおり、当社では安全の確保を第一に駅空間の利便性や快適性を損なうことなく駅構内の物流作業を省力化することを目指して、自動搬送ロボット活用に向けた開発を進めています。このたび、実用化に向けて「自動搬送ロボット(試作機)」がお客様の移動に及ぼす影響を検証するため、名古屋駅コンコースにおいて営業時間帯に自動搬送ロボットの実証試験を行います。 1.試験期間(予定) 2025年10月20日(月)~2026年3月31日(火) ※実施日及び実施時間帯は、駅の掲示にてお知らせします。 2.試験エリア 名古屋駅コンコース 3.試験内容 ・営業時間帯に自動搬送ロボットを走行させます。ロボットは荷物台車を牽引して予め設定したルートを走行し、走行には係員が付き添います。 ・周囲の状況を確認するため、ロボットに搭載した360°カメラで撮影を行います。 ・ロボット走行時の人の流れを評価するため、天井に設置したセンサにより点群データを取得します。 4.個人情報の取り扱い ・360°カメラでの撮影により取得した映像データ及び点群データは、本実証試験にのみ利用します。 ・取得したデータは検証を委託する目的で、共同研究先である東海国立大学機構名古屋大学へ提供します。 ・データは、独立したサーバ内で厳正に管理した上で、技術開発終了後、速やかに削除します。なお、技術開発の終了は2028年3月31日(金)を予定しています。 5.映像撮影に関するお問い合わせ先 JR東海サービス相談室 050-3772-3910 ※受付時間9:00~17:00(土・日・祝、年末年始を除く) ※お電話の際は音声ガイダンスに沿って「4」を選択してください。 |
||
|
||
|
|
